

Aufs Feiern hatte sich das FH-Team für Autonomous Underwater Vehicles (AUV – autonome Unterwasserfahrzeuge) bei seinem Aufenthalt im norditalienischen La Spezia gar nicht eingestellt. Ziel war es, sich bei der „Student Autonomous Underwater Challenge – Europe“ (SAUC-E) im September 2014 mit dem selbstkonstruierten Unterwasserroboter zumindest für den Finaltag zu qualifizieren. Tatsächlich haben die Studierenden mehr geschafft als sie sich erträumt hatten.
Der zweite Platz in der Gesamtwertung und der erste Preis für das Best Journal Paper, dieses Ergebnis überraschte dann doch alle im Team. Vielversprechende Andeutungen hatte die Jury des SAUC-E zwar schon während des Wettbewerbs gemacht, aber an einen großen Erfolg wollte niemand aus der AUV-Gruppe TomKyle* recht glauben. „Auf Aussagen wie ‚Wir wollen noch nichts verraten, aber das war wirklich gut‘ wollten wir uns nicht verlassen“, erzählt Deike Fietz, die am Fachbereich Informatik und Elektrotechnik Technologiemanagement und -marketing studiert. „Manche Menschen sind schließlich einfach höflich.“ Da das Kieler Team sein Fahrzeug zum ersten Mal mit anderen messen konnte, war die Unsicherheit groß: Bis das Ergebnis bekannt gegeben wurde, konnten die Mitglieder weder die Leistung der Konkurrenz noch ihre eigene einschätzen. Denn bei der Lösung der Aufgaben standen sie durchaus vor Problemen: Ein Sensor fiel aus, das AUV musste neu gestartet werden. „Etwas beruhigter waren wir, als wir merkten, dass bei den anderen Teams der Schuh an ähnlichen Stellen drückte“, sagt die 24-Jährige, „aber es war schon eine knappe Kiste.“

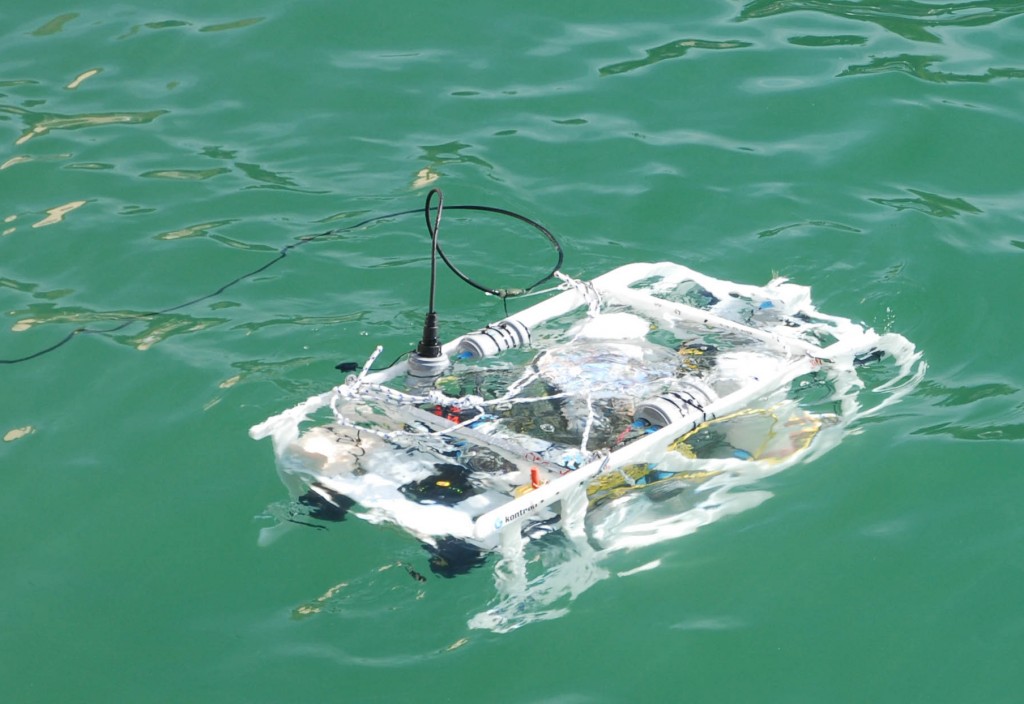
September 2014 ins norditalienische La
Spezia – die Chance, sich erstmals mit anderen
Teams zu messen, ließ sich niemand entgehen.
So richtig ins Schwitzen gekommen war das Team schon eine Woche vor dem Wettbewerb, als das Herz des AUV, das Mainboard, den Geist aufgab. Noch bis kurz vor dem Start waren einige wichtige Algorithmen aus Zeitmangel nicht fertig programmiert und auch im Verlauf des siebentägigen Wettbewerbs tüftelten alle Mitglieder fortwährend an ihrem AUV herum. Vor allem, um es an die Bedingungen vor Ort anzupassen, denn der Roboter verhielt sich wegen des höheren Salzgehalts im Mittelmeer anders als bei den Testläufen in Kiel. „Zum Glück hatten wir unser AUV zuhause an verschiedenen Orten wie im Freibad oder in der Schwentine ausprobiert und wussten daher ungefähr, wie sich verschiedene Umgebungen auswirken können“, sagt Schiffbau-Student Andreas Kaschube.

So sahen auf dem Sonarbild beispielsweise die Kaimauern in La Spezia deutlich anders aus als die in Kiel. „Sie sind mit vielen Algen und Muscheln bewachsen, die das Echo viel besser schlucken. Auch darauf mussten wir unsere Detektoren einstellen.“ Andere Probleme, mit denen das Team fest gerechnet hatte, lösten sich vor Ort in Luft auf: Ein Sensor, mit dem es immer gehapert hatte, funktionierte plötzlich erstaunlich gut.

Spezia behielten einige Teammitglieder das AUV
bei seiner Mission vom Boot aus immer im Auge.
Um sich für das Finale zu qualifizieren, musste das Team sein AUV durch ein sogenanntes Validation Gate manövrieren – ein zwei Meter breites Tor aus Bojen. Das sei, vereinfacht gesagt, viel komplizierter als mit einem Auto, betont Deike Fietz, denn ein AUV habe ein anderes Bewegungsverhalten. „Es lässt sich nicht nur auf der Ebene, sondern auch nach oben und unten bewegen, also im dreidimensionalen Raum“, erklärt die Studentin. Mal ganz abgesehen davon, dass es von der Strömung erfasst und abgetrieben werden kann.“ Ein Sensor zeige an, welche Strecke das AUV zurückgelegt hat. Den brauche man beim Autofahren nicht. „Bei einem Autoreifen mit einem Umfang von 80 Zentimetern bringen mich zwei Radumdrehungen 1,6 Meter voran. Beim AUV muss ich die Motoren auf eine bestimmte Art ansteuern, schauen, was der Sensor für Werte liefert und diese rückkoppeln.“ Weitere Punkte konnten die Teams sammeln, indem sie in 40-minütigen Timeslots wahlweise Objekte wie Bojen oder eine Blackbox optisch oder akustisch im Wasser aufspürten, mit einem zweiten AUV kommunizierten und es als Unterstützung anforderten, Unterwasserstrukturen ausfindig machten und davon 3-D-Modelle erstellten oder verschiedene Aufgaben miteinander verketteten.

Nicht alles, was sich das Kieler Team vornahm, klappte einwandfrei, daher war die Freude über den Erfolg groß – hatte das AUV doch seine Bewährungsprobe mit Bravour bestanden, wie auch Marcel Rothenbeck, AUV-Ingenieur am GEOMAR, fand: „Autonome Unterwassertechnologie ist hochkomplex und man ist nie vor Überraschungen sicher. Deshalb ist es schon eine kleine Sensation, mit einer kompletten Neuentwicklung in einem internationalen Wettbewerb auf Anhieb einen zweiten Platz zu erreichen.“ Rothenbeck hatte das Projekt der FH-Studierenden mit initiiert und von Anfang an betreut. Ziel sei immer die Teilnahme an dem Wettbewerb gewesen, erklärt Projektleiterin Prof. Dr.-Ing. Sabah Badri-Höher aus der Arbeitsgruppe Digitale Signalverarbeitung der FH Kiel. Auf der Suche nach einem Kooperationspartner war die AUV-Gruppe des GEOMAR Helmholtz-Zentrums für Ozeanforschung Kiel Ende 2012 an die Professorin vom Fachbereich Informatik und Elektrotechnik herangetreten. Gemeinsam sollte ein leicht zu handhabendes Unterwasserfahrzeug entwickelt werden, das sich – anders als das von GEOMAR bereits betriebene 880 Kilogramm schwere Modell – für Forschungsaktivitäten im Flachwasserbereich eignet. Über eine Finanzierung der Helmholtz-Initiative ROBEX (Robotische Exploration unter Extrembedingungen) stellte GEOMAR die Mittel für die Sensorik des Unterwasserfahrzeugs bereit und schon im Januar 2013 machte sich ein kleines Team an die Arbeit.
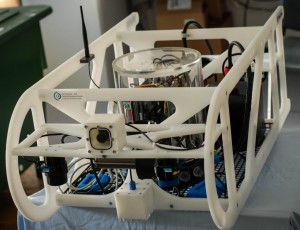
„ROBBE 131“ der FH Kiel mit 45 Kilogramm ein
Leichtgewicht und eignet sich hervorragend zu
Forschungsaktivitäten im Flachwasserbereich.
Das Ergebnis ist heute einen Meter lang, 50 Zentimeter breit, rund 50 Zentimeter hoch und wiegt 45 Kilogramm. GEOMAR unterstützte die Fertigung von Bauteilen und stand den Studierenden mit fachlichem Rat zur Seite. Teammitglied Andreas Kaschube schätzt das Know-how der Fachleute. „Ich bin oft hingegangen, um direkt abzuklären, ob meine Überlegungen Sinn ergeben und in der Umsetzung funktionieren können, oder auch nachzuhaken, welche alternativen Methoden es gibt.“ Neben seiner Arbeit als Projektleiter verantwortet er gemeinsam mit einem Kommilitonen die Konstruktion und die gesamte Mechanik des Roboters. Der Student vom Fachbereich Maschinenwesen ist durch sein Interesse an der Sonartechnik zum Team des Fachbereichs Informatik und Elektrotechnik gestoßen. Er sieht große Chancen, später als Schiffbauer in der AUV-Branche zu arbeiten. Ob zur Kartierung des Meeresbodens, bei der Untersuchung von Methanvulkanen oder Flugzeugabstürzen oder der Wartung von Pipelines und Offshore-Windparkanlagen – der Markt der unbemannten Unterwasserfahrzeuge sei in Industrie und Wissenschaft schließlich groß im Kommen und werde stark gefördert. „Tauchereinsätze sind irre teuer, aufwendig und auch gefährlich. Der Einsatz von Unterwasserrobotern könnte immense Kosten einsparen“, erklärt der 23-Jährige.

Deike Fietz ist über ihre studienintegrierte Projektarbeit im AUV-Team gelandet – und geblieben. Inzwischen ist sie im Rahmen ihrer Bachelorthesis zuständig für die autonome Navigation des AUV mit Sonar, einem Verfahren zur Ortung von Gegenständen mithilfe ausgesandter Schallimpulse. Sie sorgt dafür, dass das Fahrzeug gleichzeitig eine Umgebungskarte erstellt und sich selbst darin lokalisiert. SLAM (Simultaneous Localization and Mapping) heißt das in Fachkreisen – ein sehr anspruchsvoller Bereich, aber gerade das sieht sie als eine riesige Chance. „Teilweise muss ich mich schon durchbeißen, aber es fällt mir nicht so schwer, weil es mich sehr interessiert.“ Die Arbeit ermögliche tiefere Einblicke in die Praxis als es sonst im Studium möglich sei. „Alles, was ich entwickele, setze ich praktisch um, und ich bekomme auch gleich ein Feedback, ob es tatsächlich funktioniert.“ Und noch einen Pluspunkt vergibt sie für das Projekt: Als sie sich um Praktika bewarb, wurde ihr zum ersten Mal bewusst, wie hoch potentielle Arbeitgeberinnen und Arbeitgeber Engagement über das Pflichtstudium hinaus einstufen.
Diese Argumente müssten doch auch weitere Studierende motivieren, in die faszinierende Unterwasserroboterwelt abzutauchen und das Team zu verstärken, findet sie. „Nur keine Scheu! Jede und jeder kann bei uns klein anfangen und sich dann weiterentwickeln und spezialisieren. Auch wer befürchtet, zu wenig Zeit zu haben, soll gerne mal vorbeikommen – wir haben bisher immer eine Lösung gefunden. Niemand muss mehrere Tage in der Woche opfern, für kleinere Aufgaben reichen manchmal schon wenige Stunden aus und bei uns kann man sich seine Zeit sehr frei einteilen.“ Aufgabenbereiche gibt es viele: Sensorik, Bildverarbeitung, Platinenlayout, Batteriemanagement, die Entwicklung der Benutzeroberfläche GUI (Graphical User Interface), Konstruktion und KI-Programmierung, um nur einige zu nennen. Doch auch aus Fachbereichen wie Medien und Wirtschaft, die vielleicht nicht unmittelbar mit Unterwasserfahrzeugen zu tun haben, wünscht sich das Team Unterstützung. „Fundraising und Öffentlichkeitsarbeit sind sozusagen unsere Waisenkinder. Bisher müssen wir diese Themen nebenbei erledigen, ohne viel Ahnung davon zu haben“, bedauert Deike Fietz.
Das Projekt sei klar umrissen mit festen Regeln, so Prof. Badri-Höher, verschiedene Disziplinen müssten eng abgestimmt zusammenarbeiten. Anders funktioniere das auch gar nicht, meint auch Deike Fietz. Niemand könne nur stur sein eigenes Ding machen und nicht nach links und rechts gucken – schließlich solle ein funktionierendes Gesamtsystem entstehen. Auch Andreas Kaschube schätzt das interdisziplinäre Arbeiten, sein „kleiner Elektrotechnik-Grundkurs“ habe ihm nicht geschadet. „Ich kann inzwischen löten und die meisten Kabel konfektionieren. Mein Grundwissen zum Umgang mit Gleich-, Wechsel- und Drehstrom ist deutlich gewachsen.“
Andreas Kaschube wird seine elektrotechnischen Kenntnisse auch künftig weiter ausbauen können, denn nach dem Erfolg in Italien ist nur kurzfristig Ruhe eingekehrt: In diesem Jahr peilen die Studierenden die Teilnahme an einem weiteren Wettbewerb an. Dessen sogenannte Mission Rules diskutierte das Team schon am Ende des Jahres 2014. So sind alle auf dem gleichen Stand und wissen, wohin die Reise gehen soll.
* ursprünglicher Name der Stadt Kiel aus dem 13. Jahrhundert
von Katja Jantz